現在開発中のシステム
高度な自動運転支援技術を実現するために、現在開発中のシステムをご紹介します。
高速道路における渋滞時の軽微衝突事故対策 ・ ドライバー負荷軽減に貢献
全車速 車間距離維持支援システム:全車速ACC(Full Speed Range Adaptive Cruise Control)
天候に左右されにくく、遠方の検知を得意とする「ミリ波レーダー」で前走車を検出し、車間距離を自動的に維持します。前走車が減速・停止すると自車も完全停止し、前走車が発進すると追従を開始します。
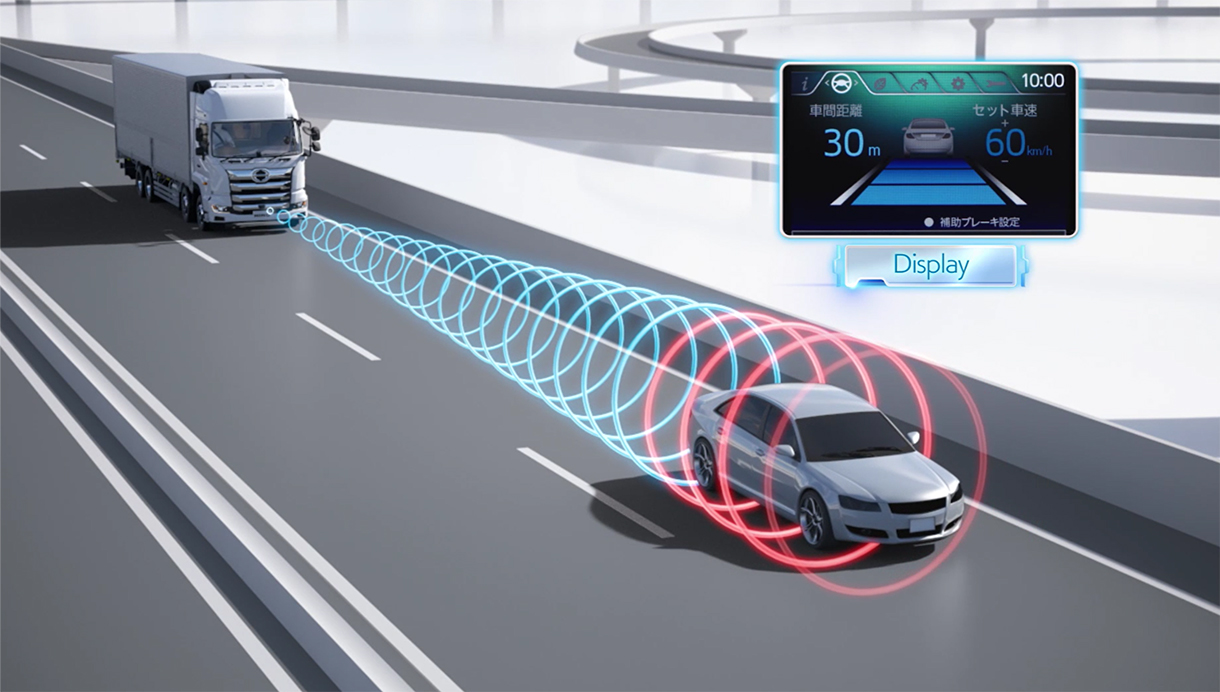
協調型 車間距離維持支援システム:CACC(Cooperative Adaptive Cruise Control)
ミリ波レーダーで車間距離を維持する事に加え、通信で前走車の加減速情報を受信します。それに基づき自車の加減速を制御し、車間距離をさらに安定的に維持します。
※いすゞ自動車と共同開発
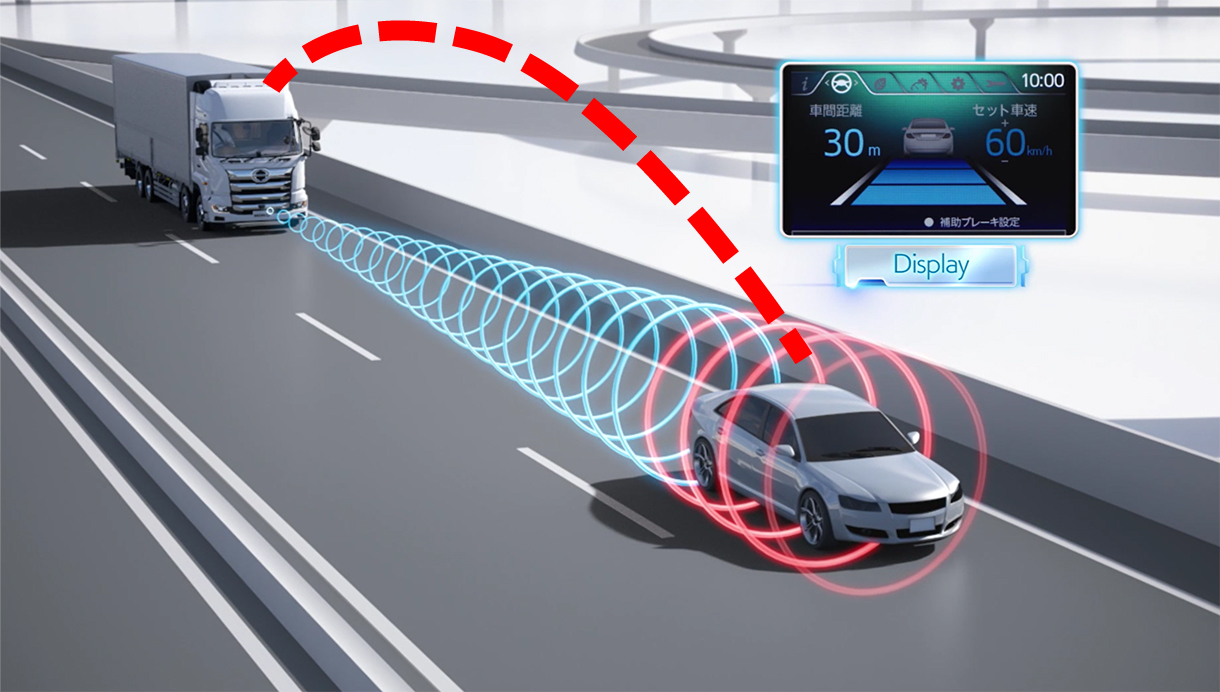
高速道路における車線逸脱事故対策・ ドライバー負荷軽減に貢献
車線維持走行支援 :LKA(Lane Keep Assist)
カメラで白線を認識し、車線の中央を狙ったステアリング制御を行い、車線内の走行を支援します。全車速域に対応可能です。
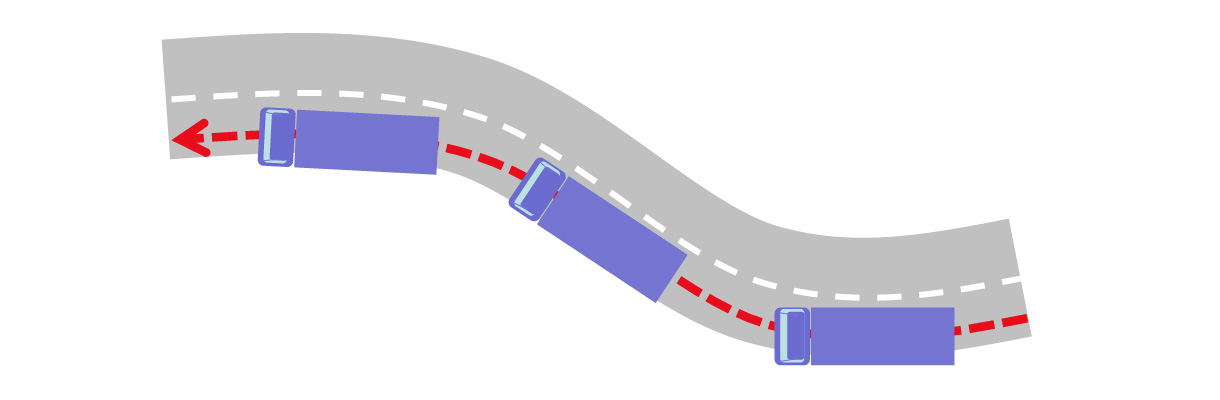
構内における物損事故対策・ドライバー負荷軽減に貢献
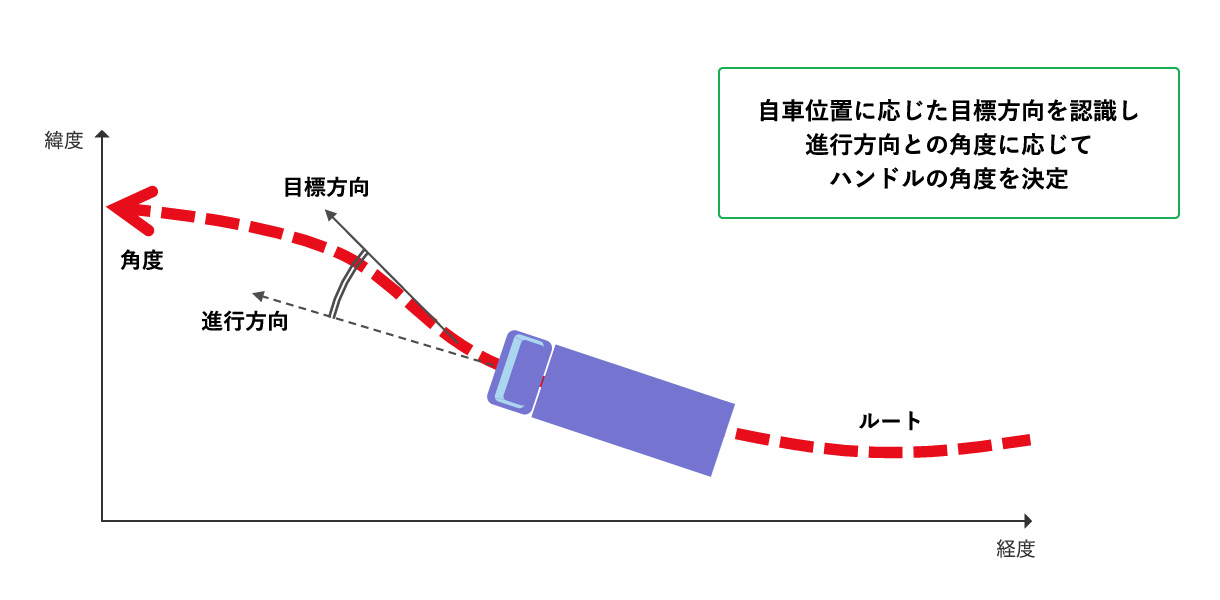
GPSルート誘導
緯度、経度で表現された経路(ルートマップ)に沿うように、GPS情報をもとにハンドルを制御します。
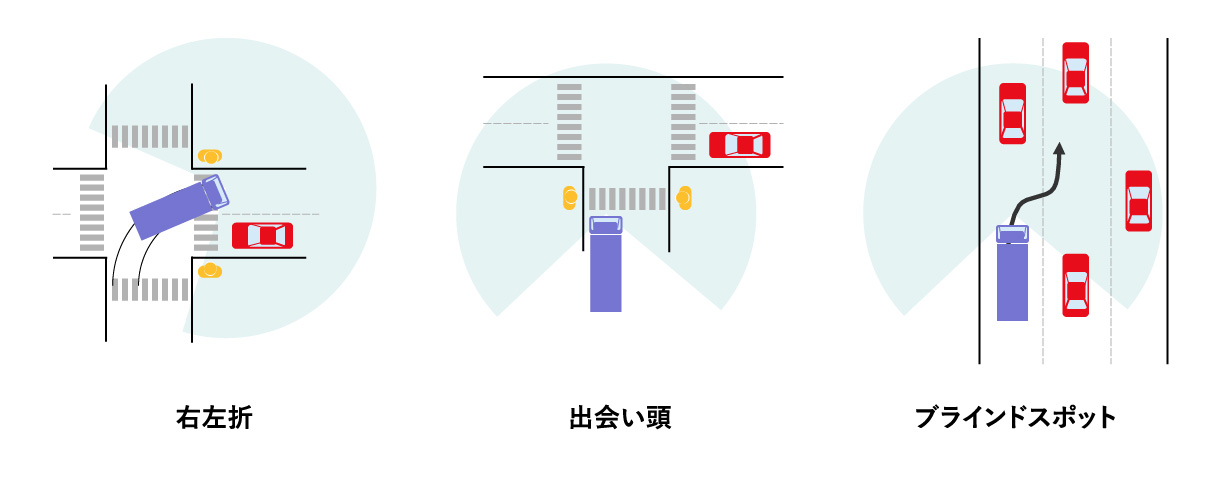
自車・周辺環境の把握、車両・歩行者などとの接触事故対策に貢献
周辺監視システム
カメラやセンサーで自車の周辺環境を検知し、接触の危険性がある際はドライバーに注意を促します。
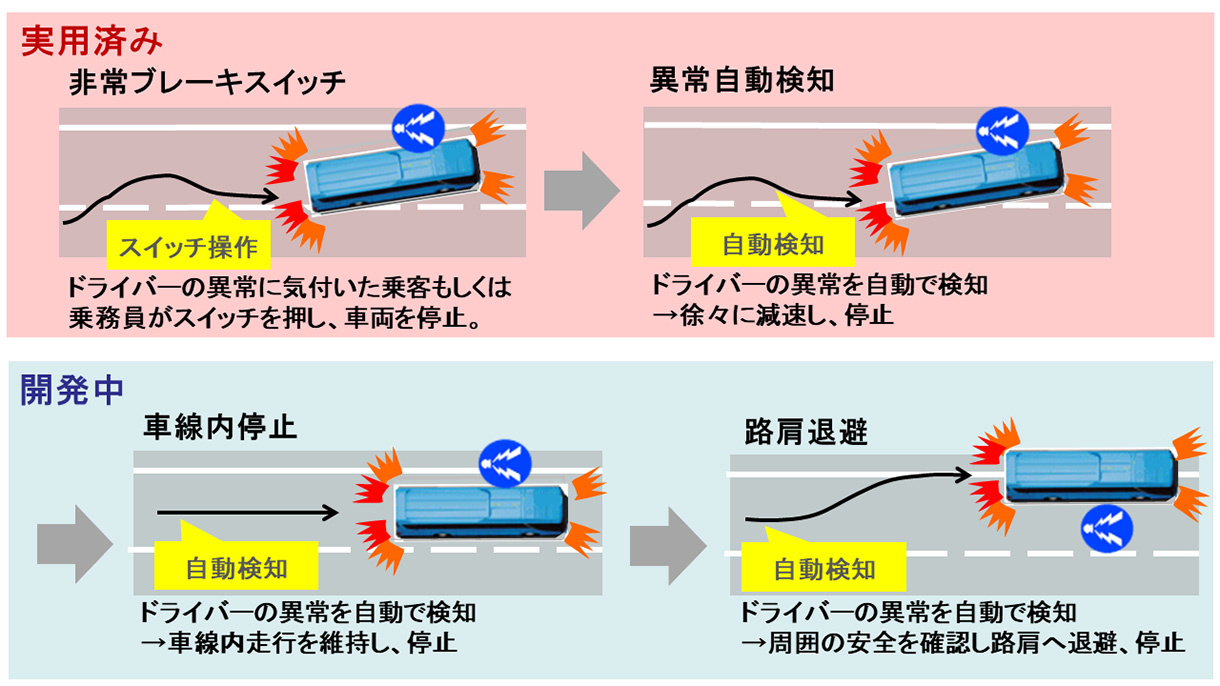
自車・周辺環境の把握、ドライバーの健康起因事故の対策
ドライバー異常時対応システム :EDSS(Emergency Driving Stop System)
ドライバーの健康起因事故の対策に貢献する技術として、ドライバーが急病等で運転継続が困難な場合に、車両を停止させるためのシステムです。開発した技術を段階的に実用化し、速やかな市場投入を行う予定です。
HINO TOPICS
-
商品・技術情報
 2026.6.26 <インタビュー>大型観光バス日野セレガ、約20年ぶりにデザインを刷新
2026.6.26 <インタビュー>大型観光バス日野セレガ、約20年ぶりにデザインを刷新 -
その他
 2026.3.25 <取り組み紹介>25年度の『再出発の日』の取り組みについて
2026.3.25 <取り組み紹介>25年度の『再出発の日』の取り組みについて -
ニュース
 2025.11.4 ARCHIONグループの経営体制について
2025.11.4 ARCHIONグループの経営体制について -
ニュース
 2025.10.9 日野と三菱ふそうの新持株会社の概要について
2025.10.9 日野と三菱ふそうの新持株会社の概要について
商品・技術情報 2026.6.26
<インタビュー>大型観光バス日野セレガ、約20年ぶりにデザインを刷新
日野自動車は、2026年5月に大型観光バス「日野セレガ」を改良して発売しました。最新の安全装備の搭載や静粛性と乗り心地を改善し、ドライバーと乗客に安心で快適な移動を提供します。
さらに、約20年ぶりにボディーデザインの刷新を行いました。
今回は、「日野セレガ」のデザイン刷新の背景とデザインに込めた想いについて、デザインセンターの3人にインタビューしました。ぜひお読みください。
その他 2026.3.25
<取り組み紹介>25年度の『再出発の日』の取り組みについて
日野自動車では、今後の事業再建に向け、HINOウェイ・コンプライアンス遵守を礎とした考動が不可欠です。事業永続の為、改めて不正防止を誓い、同時に風化防止の象徴と位置づけ、24年から3月4日を『再出発の日』として制定しました。